Gyroscope is a mechanical system or arrangement which is generally employed for the study of precessional motion of a rotary body. It is derived from the word ‘Gyre’, a Greek word, meaning circular motion it finds its applications in gyrocompasses, aircraft, naval ship, control system of missiles and space shuttle. Very carefully engineered gyroscopes are used for navigation because the axis of spin point in a nearly fixed direction when external torques are small. This makes the gyroscope a good replacement for a magnetic compass, particularly in regions where magnetic compasses are unreliable.
A gyroscope consists of a rotor mounted in the inner gimbal which is mounted on a fixed frame as shown in Figure. When the rotor spins about X-axis with angular velocity ω rad/sec and the inner gimbal precesses about Y-axis, the mechanism is forced to turn about Z-axis other than its own axis of rotation and the gyroscopic effect is thus setup. The resistance to this motion is called gyroscopic effect.
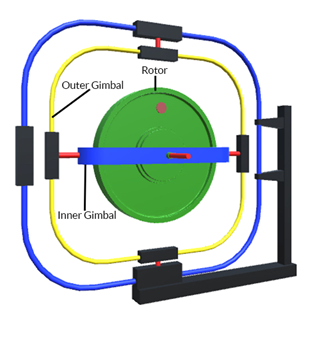
Gyroscope
The three mutually perpendicular axes are called
(i) Axis of spin along X-axis.
(ii) Axis of precession along Y-axis.
(iii) Axis of gyro-couple along Z-axis.
There are three mutually perpendicular planes as shown in Figure called
(i) Plane of spinning in YOZ plane perpendicular to X-axis
(ii) Plane of precession in XOZ plane perpendicular to Y-axis
(iii) Plane of gyro-couple in XOY plane perpendicular to Z-axis
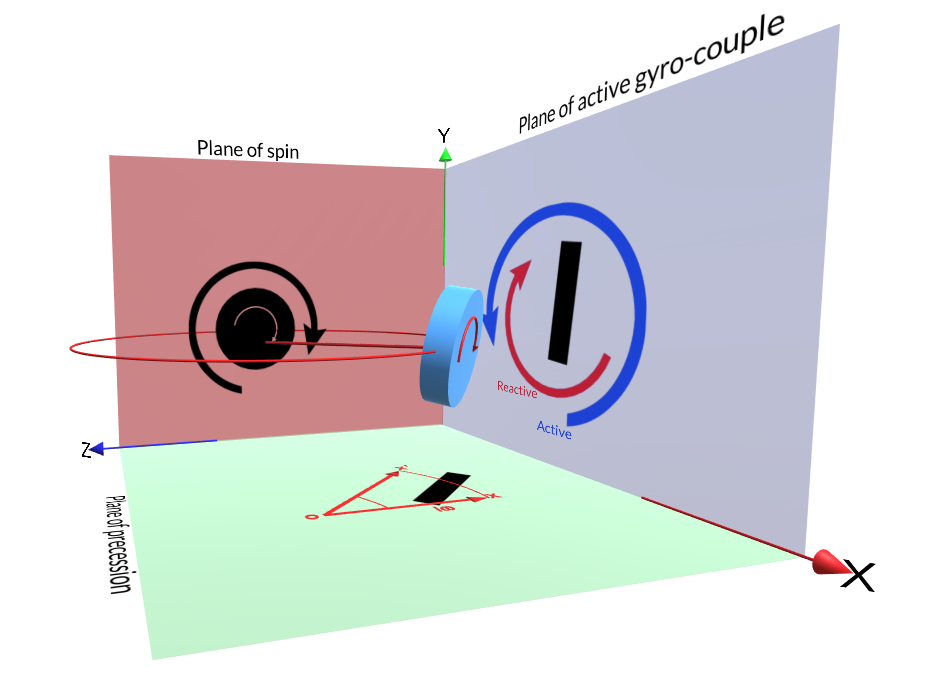
Three Mutually Perpendicular Planes
Three mutually perpendicular planes (Fig.- 10.2)
Let a disc of moment of inertia I, rotate at an angular velocity ω rad/sec about the X-axis. Let the disc spins about X-axis called the spin axis, the angular momentum of the rotating disc is given by Iω. Now suppose the spin axis precesses through a small angle δθ about Y-axis in the plane XOZ, with an angular velocity of ωp rad/sec.
Let the vector OX shown in Figure, represents the angular momentum of the disc, Iω. Let it changes to OX’ by a small angle δθ in a time interval of time δt in the XOZ plane.
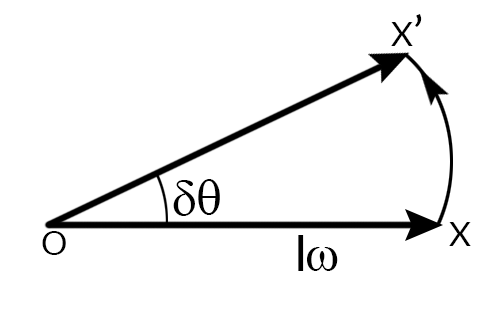
Angular momentum vector (Fig.- 10.3)
The change of angular momentum,
XX′=OX.δθ=Iωδθ
and the rate of change of angular momentum
=Iωδθδt
This rate of change of angular momentum will give rise to a couple to the axis.
C=limδθ→ 0(Iωδθδt)=Iωdθ dt=Iωωp,where ωp is the angular velocity of precession.
The gyroscopic couple is given by C = I.ω.ωp where ω.ωp is the acceleration components. The direction of torque vector will be along the spin vector on rotating spin vector in the direction of precession vector. To cause precession of a spinning body, an external torque must be applied to the body or a rotor in a plane normal to the plane in which the spin axis is precessing.
Direction of Spin vector, Precession Vector and Couple Vector with Forced Precession
To determine the direction of spin, precession and couple vector, right hand screw rule or right hand rule is used.
Right hand rule: Let the four fingers of the right hand represent the rotation, then the thumb shows the direction of the spin vector. The precession vector direction is also found in the same manner.
Rotate the spin vector in the direction of precession by 90o, in order to get the direction of the gyro-couple. Please note that, for analyzing the gyroscopic effect of the body, always reactive gyroscopic couple is considered.